網頁最後修改時間:2022/03/29

本篇要來介紹小車套件中不同分類所用的控制端軟體,內容有:
-
(01)BLE 遙控車
- (02)BLE PID 循跡車
- (03)結論
網頁最後修改時間:2022/03/29
本篇要來介紹小車套件中不同分類所用的控制端軟體,內容有:
網頁最後修改時間:2022/03/23

套件的 BLE (Bluetooth LE,低功號藍牙)模組 MLT-BT05 有兩種:一種是有按鈕的;另一種是沒按鈕的。如果單純只是想要改變模組的設定,沒有連線的情況下是不需要這顆按鈕的。
MLT-BT05 在使用之前,必須根據小車主控板的程式來做相對應的參數設定,本篇將針對這些主要的重點部分來做說明,內容有:
網頁最後修改時間:2022/03/20

本篇是兩輪小車 V1.0 DIY 套件的組裝建議說明,裡面內容有:
網頁最後修改時間:2022/03/16

本篇內容,展示兩輪小車 V1.0 DIY 套件不同分類之間實際操作的影片,內容有:
網頁最後修改時間:2022/03/11
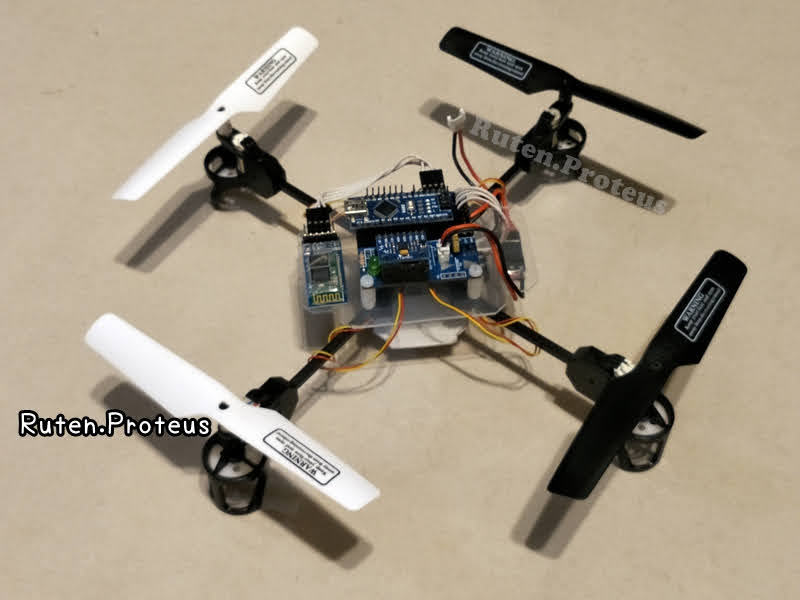
這篇網頁是 "{5} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.0 DIY 套件組裝說明" 套件升級 V3.1 版本針對改版的部分的組裝補充說明,主要的組裝還是以{5.0}為主,相關對應的部分會附上連結作為相互對照。
這一篇主要的重點在於:
** 特別說明!由於上述的重點,V3.1 套件中關於模組變更的部分除了升壓模組之外,本篇所有照片中的 MPU6050 模組是直接借用 V3.0 套件的,V3.1 套件所使用的那款(功能不變,絲印變更的)請上賣場看,因為它不是本篇主要說明的重點。
本篇(盡量維持與前一篇章節的編號,但可能不是很連貫,請見諒!)內容有: