網頁最後修改時間:2022/03/11
這篇網頁是 "{5} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.0 DIY 套件組裝說明" 套件升級 V3.1 版本針對改版的部分的組裝補充說明,主要的組裝還是以{5.0}為主,相關對應的部分會附上連結作為相互對照。
這一篇主要的重點在於:
- 飛控板鎖附方式的改變與組裝方式;
- 飛控板 5V 電源輸入接頭形式的改變與焊接說明;
- 升壓模組輸入輸出線材的改變和焊接說明;
** 特別說明!由於上述的重點,V3.1 套件中關於模組變更的部分除了升壓模組之外,本篇所有照片中的 MPU6050 模組是直接借用 V3.0 套件的,V3.1 套件所使用的那款(功能不變,絲印變更的)請上賣場看,因為它不是本篇主要說明的重點。
本篇(盡量維持與前一篇章節的編號,但可能不是很連貫,請見諒!)內容有:
*********************************************************************************
更多多軸無人機 DIY 套件和套件,請至賣場分類網頁:{ 多軸無人機 } [DIY] 配件,套件
點擊興趣商品,裡面會有該商品詳細的介紹。
*********************************************************************************
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
有購買商品的使用者,網頁中所需相關資料已放置於雲端硬碟,請自行下載使用!
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
【(01)零件焊接】[V3.0]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(01-01)飛控板的焊接與模組組裝說明
[V3.0]
準備好下面的零件,將矽膠線從中間剪斷(建議只留下 80mm 或是維持剪斷之後的長度亦可)。

將焊接好的飛控板和電源接頭,對照矽膠線的接頭方向,插入到下面照片中標示的孔位中準備焊接。
**!!! 電源接頭有其方向性,焊接之前一定要再加確認!!!**

焊接好的接頭以及插入矽膠線後的正確樣子,就如下照片所示。

完成後,插上所有的模組到飛控板就如下照片所示。

/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(01-02)升壓模組的焊接與調整 [V3.0]
V3.1 和 V3.0 套件裡的升壓模組都一樣,需要解開 A / B 兩接點,只不過 V3.1 的接點使用電阻連接,兩者功能上並無不同!
解焊時,只要先在焊槍先上一些錫,然後直接朝焊點上的電阻焊接下去,一但錫融化下去後,將焊槍往左或右移動開焊點,就能順便將焊點上面的電阻拖出來。
完成後,準備好下面照片中的線材,照片中的接頭往哪一邊就是要焊接到升壓模組的那一邊。

如下照片所示,c1 和 c2 的長度可以維持矽膠線從中剪斷的長度 10 公分。要使用實際長度的話,可以將升壓模組黏到飛控板塑料連接板後再去抓,不然就維持原長度即可。
完成升壓模組的線材焊接之後,就類似如下照片所示。照片中 A-c1 = 7 公分;B-c1 = 8 公分;A-c2 維持原線材長度,只要夠插上鋰電池即可。

【(04)馬達驅動板安裝】 [V3.0]
這個部分主要的變更,就是飛控板固定在塑料連接板的金屬螺絲和金屬螺帽,改用較輕的尼龍柱與尼龍螺絲。
準備好下面四組零件。

先將四根尼龍柱鎖到塑料連接板上(鎖到底再退出一些,留一點空隙不要鎖緊)。

接著將飛控板固定到四顆尼龍柱上(鎖到底就行)。

利用工具夾住尼龍柱,依序對角鎖緊塑料連接板下方的四顆尼龍螺絲。

完成後,把飛控板拆掉,並將塑料連接板鎖到機架上。

/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
要這樣做的原因很簡單,避免塑料連接板下方四個孔的位置和孔徑在製作的時候出現偏移或太大。若以飛控板的四個孔的位置做依據來訂出四顆尼龍柱的位置,可避免之後固定飛控板時孔位對不上的問題。
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
【(05)飛控板安裝】 [V3.0]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(05-01)升壓模組安裝 [V3.0]
將做好的升壓模組貼到如下照片的位置,然後將輸入端的電源接頭插到馬達驅動板上。

/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(05-02)飛控板固定 [V3.0]
【(06)接線】 [V3.0]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(06-01)5V 電源與馬達驅動板訊號線的連接 [V3.0]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(06-02)藍牙模組的安裝與連接 [V3.0]
拿出四顆尼龍螺絲,將飛控板以對角鎖的方式鎖緊到四顆尼龍柱上,然後插上飛控板的電源插頭、藍牙模組和馬達驅動板訊號線。
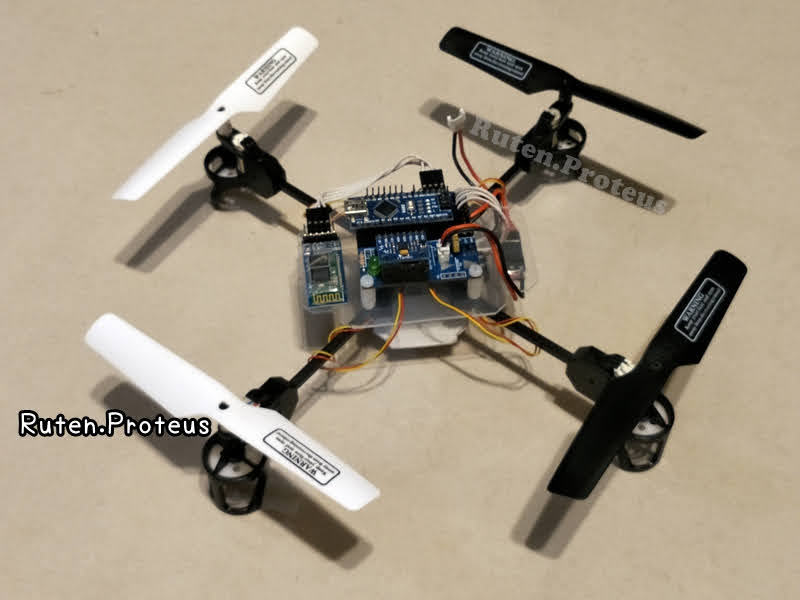
完成後,整機組裝完成,就類似如下照片所示。

【(08)結論】
V3.1 套件改版的目的,是為了減輕飛控板固定零件的重量和簡化組裝的時間、另外也更換了升壓模組兩端用來供給馬達驅動模組和飛控板電源輸入的線為矽膠線、也改變了飛控板 5V 電源接頭型式,除了改善整體重量也提高線徑對於電流承受的能力。
下面照片是飛控板固定螺絲和電源線改板之後的重量比較,整體重量至少減輕 8 克以上。


.
.
<<部落格相關文章>>
- {5.1} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.1 DIY 套件小改版組裝說明
針對 V3.0 改版為 V3.1 的部分作補充的組裝說明。 - {5} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.0 DIY 套件組裝說明
以{4} 自製四軸無人機 - DIY 套件的組裝說明 作為基礎,四軸無人機 V3.0 DIY 套件的組裝說明。 - {1} 自製四軸無人機 - {使用預設PID} 飛行測試
未調整之前使用預設的 PID 參數的飛行測試;主要是測試通訊以及硬體動作是否正常運作。

- {2} 自製四軸無人機 - PID 調整後的飛行測試
為了快速調整 PID 參數並能馬上做測試,由於硬體沒有改變,因此修改韌體為使用遙控器做操作,手機藍牙連線 MWC Nano 飛控板做即時的 PID 調整,直到調整後做飛行測試,實際測試的結果比使用預設參數更為順手,反應也更加靈敏與好操作。

- {3} 自製四軸無人機 - Arduino MWC Nano 飛控板焊接建議與說明
飛控板焊接建議、接線與測試校正說明。

- {4} 自製四軸無人機 - DIY 套件的組裝說明
四軸無人機 DIY 套件的組裝說明

- {SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 1 of #} 預設 PID 自穩與飛行(翻滾)測試
網頁中有兩種使用 SP Racing F3 EVO 四軸 8520 空心杯馬達無人機飛行測試影片。 - {SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 2 of #} 8520 小四軸機架組裝說明影片
利用影片來重點講解 "SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 DIY 套件" 中的機架與 8520 空心杯馬達如何做安裝,也簡單說明一下螺旋槳與飛控板在安裝要注意的點。
針對 V3.0 改版為 V3.1 的部分作補充的組裝說明。
以{4} 自製四軸無人機 - DIY 套件的組裝說明 作為基礎,四軸無人機 V3.0 DIY 套件的組裝說明。
未調整之前使用預設的 PID 參數的飛行測試;主要是測試通訊以及硬體動作是否正常運作。

為了快速調整 PID 參數並能馬上做測試,由於硬體沒有改變,因此修改韌體為使用遙控器做操作,手機藍牙連線 MWC Nano 飛控板做即時的 PID 調整,直到調整後做飛行測試,實際測試的結果比使用預設參數更為順手,反應也更加靈敏與好操作。

飛控板焊接建議、接線與測試校正說明。

四軸無人機 DIY 套件的組裝說明

網頁中有兩種使用 SP Racing F3 EVO 四軸 8520 空心杯馬達無人機飛行測試影片。
利用影片來重點講解 "SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 DIY 套件" 中的機架與 8520 空心杯馬達如何做安裝,也簡單說明一下螺旋槳與飛控板在安裝要注意的點。
.
.
沒有留言:
張貼留言
留言屬名為"Unknown"或"不明"的用戶,大多這樣的留言都會直接被刪除掉,不會得到任何回覆!
發問問題,請描述清楚你(妳)的問題,別人回答前不會想去 "猜" 問題是什麼?
不知道怎麼發問,請看 [公告] 部落格提問須知 - 如何問問題 !