網頁最後修改時間:2021/10/20

這篇網頁是 "{4} 自製四軸無人機 - DIY 套件的組裝說明" 套件版本升級 V3.0 後,針對零件變更的部分,補充該部分的組裝說明。
上一篇已談論過的內容,不會在這一篇重複提及,如果對本篇內容有任何疑惑的話,請參閱上一篇的內容。
飛控板雖然也有升級底板的設計,但在這裡只針對重點需要的部分做說明,其他的請參閱 "{3} 自製四軸無人機 - Arduino MWC Nano 飛控板焊接建議與說明" 網頁裡面內容就可以。
本篇內容有:
- (01)零件焊接 [V3.1]
- (02)飛控板塑料連接板與鋰電池置放塑料底板製作
- (03)機架組裝
- (04)馬達驅動板安裝 [V3.1]
- (05)飛控板安裝 [V3.1]
- (06)接線 [V3.1]
- (07)鋰電池置放塑料底板安裝與說明
- (08)結論
*********************************************************************************
更多多軸無人機 DIY 套件和套件,請至賣場分類網頁:{ 多軸無人機 } [DIY] 配件,套件
點擊興趣商品,裡面會有該商品詳細的介紹。
*********************************************************************************
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
有購買商品的使用者,網頁中所需相關資料已放置於雲端硬碟,請自行下載使用!
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
看起來步驟很多,不過前面 01 - 03 不需要照順序可獨立進行,但後面的 04 - 0就要照步驟順序做,請自行斟酌安排。
【(01)零件焊接】 [V3.1]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
* (01-01)飛控板的焊接與模組組裝說明 [V3.1]:
V3.0 套件的飛控板,頂面圖如下所示。焊接的說明可以參考 "{3} 自製四軸無人機 - Arduino MWC Nano 飛控板焊接建議與說明",基本上都是排針的焊接。比較需要注意的,是要選擇 Arduino Nano 開發板的 +5V 電源,是要由 BEC 輸入,還是要由外部輸入(如下圖右下方,粉紅色的部分),這會改變接線與升壓模組的焊接方式。

本篇的組裝是採用外部 +5V 電源輸入並採杜邦排針連接的方式,所以要焊上兩根排針到板子上方(黃色短路帽的下方)。
完成焊接之後的底板如下圖所示。
接著,完成 Arduino Nano 開發板和 MPU6050 的焊接,再將其插到底板上。
完成的飛控板就如下圖所示。

出貨的時候,套件中的 Arduino Nano 開發板已預先燒錄支援藍牙控制的 MWC 飛控程式,所以當務之急趕快與電腦做連線進行通訊,看看 MWC 組態軟體是否可以與其通訊並抓取到 IMU 的數據?一定要先確定沒問題才能將其組裝到機架上!
** 上圖中,在 MPU6050 板子下方所放置的是一塊海綿(加不加都沒關係(V2.0 組裝時沒加)),主要是為了固定它,避免校正後又被亂動到了。
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(01-02)升壓模組的焊接與調整 [V3.1]:
如下所示的升壓模組。可以將 1S 鋰電池升壓至 5V/8V/9V/12V,但拿到手的升壓模組預設輸出是 DC +12V,所以焊線之前,需要將板上標示為 A 和 B 的兩個焊點解焊,這樣才能選擇升壓模組的輸出電壓為 5V。

如下圖所示的升壓模組焊接完成圖。(A) 是 1S 鋰電池電壓輸入端,(B) 是 +5V 電壓輸出端,兩端接線共用了三種不同形式的接頭:
- c1:PH2.0mm,作為馬達驅動板的電源輸入,接頭形式不可變更;
- c2:這裡使用的是 1S 供電端小白頭,接頭形式根據你買的鋰電池而有所不同。其他還有 PH2.0mm 和 JST 形式的,請根據實際買的鋰電池形式接頭去做供電端的焊接,不一定要跟下圖一樣。
- c3:這裡使用的是 1P 2.54mm 杜邦接頭,接頭形式可與 c1 用一樣的或是用 XH2.54mm 規格的。
除了 c2 用買來的小白頭直接焊之外(整段長度 10 公分左右),c1 和 c2 後來都取長度 80mm 來做線與焊接。若沒有把握的話,c1 和 c2 可以先做,之後在與升壓模組焊接後,再根據實際拉線的長度再進行裁切做接頭亦可。
套件裡面分別附了兩種不同線徑的電線,每一組各有兩條,粗的那一組用在 A 端 c1 處,細的那一組用在 B 端 c3 處。

** 上圖中 c1 的長度,實際組裝之後有再進行修改,沒有像圖中那麼長了。
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(01-03)馬達驅動板焊接與訊號線的製作:
馬達驅動板的焊接和訊號線的製作請看另一篇,不過我另外做了接線圖解,如下所示。

這裡要特別說明的是,套件中那條 6P 母接頭的線,在(從母接頭底部算))6.5 公分處截斷(不確定的話可以留長一點,手動量測後再切斷做 4P 杜邦線),退出母接頭中第二與第五條線,然後將剩下的 4 條線剝線夾上杜邦針。最後照著上面照片中的線,將這些杜邦針照順序插入到 4P 的杜邦膠座裡。
** 不管你多有自信,線做好之後一定要用電表測試是否真的導通?
【(02)飛控板塑料連接板與鋰電池置放塑料底板製作】
如下圖所示,是組裝最重要的兩塊塑料板的外型與尺寸。
若要選擇其他材質加工也可以,只要能夠放置飛控板都可以。但若是要手工製作,塑料要選擇有一定的韌性、不能是易斷或是堅硬的材質,厚度極限 1.0mm。
兩個圖面的檔案放置在雲端硬碟的 Drawings 資料夾中,分別為 base.pdf 和 battery.pdf。請一定要用 1:1 的比例將其列印出來,貼到塑料板上並循線裁剪出來。

我使用的是放棉花棒的塑膠盒子,或是手邊剛好有可以用的塑料盒子,可以先合一下塑料的尺寸是否剛好可以用。
用口紅膠塗滿圖紙的背面,然後貼到塑料上,記得要確定紙有貼緊、貼牢!
** 下面步驟要注意 ** 圖面小孔是要鑽 1.0mm 孔徑,大孔是要鑽 3.0mm 孔徑 !!!
準備一支小鐵釘或是木柄針車鑽此類型的東西,在孔位中心線中心處戳一下(千萬不要貫穿,否則小孔可能會 GG),當作鑽孔的定位點。
完成鑽孔之後,就會類似下圖所示。

經過一番修剪之後,完成的飛控板塑料連接板就如下圖所示。

記得要翻過來去除鑽孔後的塑膠毛邊!
要確保摸起來是平整的,否則會影響飛控板裝設之後的水平度。

接著,跟上面同樣的步驟,製作鋰電池置放塑料底板。這底板可以選擇性的安裝,安裝後可支援更多其他尺寸規格的 1S 鋰電池。

【(03)機架組裝】
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(03-01)空心杯馬達接頭製作:
減速馬達螺旋槳組合 (簡稱馬達支架) 預設的接頭是 JST1.25mm,這跟馬達驅動板的接頭是不符的,所以必須先把它剪掉再做處理,如下圖所示。

馬達驅動板所使用的都是 PH2.0mm 的接頭,所以馬達支架的接頭就要做成這種。
製作接頭之前必須注意,如果沒有任何意外的情況出現,那麼當你使用 1.5V 電池接到紅(+)、黃(-)線時,馬達旋轉後所造成的風力必須是往下的,不管螺旋槳的形式為左旋或是右旋。這一點在製作馬達支架接頭前必須要確認清楚,因為 PH2.0 接頭是具有方向性的,搞錯了在起飛的時候就會翻機!
也因為不管螺旋槳的形式是左旋還是右旋,轉動的時候風力都是向下的,因此此四組馬達支架的接頭做法都是相同的,都是如下圖所示一樣製作即可。

完成接頭的製作之後,就可以開始進行與馬達連接座的組裝。
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(03-02)馬達驅動板測試:
前面已經焊接好馬達驅動板,現在馬達支架上的接頭也做好了。在繼續組裝之前,要先測試裝上馬達支架到馬達驅動板後,螺旋槳的轉向是否能夠轉動且與預期一樣。
馬達驅動板的電源用單顆 1.5V 電池可能驅動不了,所以至少用個兩顆或是利用類似下面的方式進行測試(你也可以參考前一篇馬達驅動板測試一節)。

不管你的馬達是接到驅動板的哪一個接頭上,螺旋槳所產生的風都必須要往下!若是錯了,接頭的兩根線調換一下再試試,直到正確為止。
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(03-03)四軸馬達支架安裝:
** 這裡選擇黑色螺旋槳作為無人機的前方 **
這組套件鎖使用的馬達支架的安裝比較特別之處,是不需要鎖螺絲固定的!
也因為如此,因此機架連接座在與馬達支架做安裝時配合度相當好(就是緊的意思),裝的時候需要注意線要先彎曲(不能拉緊),然後把線先插入槽內,再施點力把碳纖維桿插入槽內。插入碳纖維桿的同時,也要同時注意線也要往裡推,且不可被拉緊,直到整個碳纖維桿插到槽底為止。
首先,將馬達線如下圖一樣在碳纖維桿前頭先彎曲(不可拉緊)。

先將線插入槽內,再將碳纖維桿插入往前推。推的時候要注意,適時地將線也往前推,避免在推碳纖維桿往前時把線拉緊了。

到底什麼時候才算好?可參考下面的尺寸量測。

完成四組馬達支架的安裝後,馬達連接座底部如下圖所示。

完成四組馬達支架的安裝後,馬達連接座頂部如下圖所示。

完成全部馬達支架的安裝後,無人機底部和頂部的照片,如下圖所示。


【(04)馬達驅動板安裝】 [V3.1]
在裝設馬達驅動板到無人機上前,你必須要先測試做好的接頭,以及看看馬達驅動板焊接是否沒問題?以及鎖上飛控板塑料連接板。
馬達驅動板是裝在飛控板塑料連接板中間的地方,兩個板子中心對中心的貼合在一起。
拿出套件中的:
- 四顆黑色小螺絲;
- 四支長螺絲;
- 四顆螺帽;
- 兩片兩公分的雙面膠;
先將雙面膠貼在馬達驅動板的底部。
有一點要注意,焊接之後的接頭,在馬達驅動板背面腳位會比雙面膠高,所以需要用斜口鉗修剪凸出的部分。
貼好雙面膠後,撕掉雙面膠保護膜後,放在一旁。

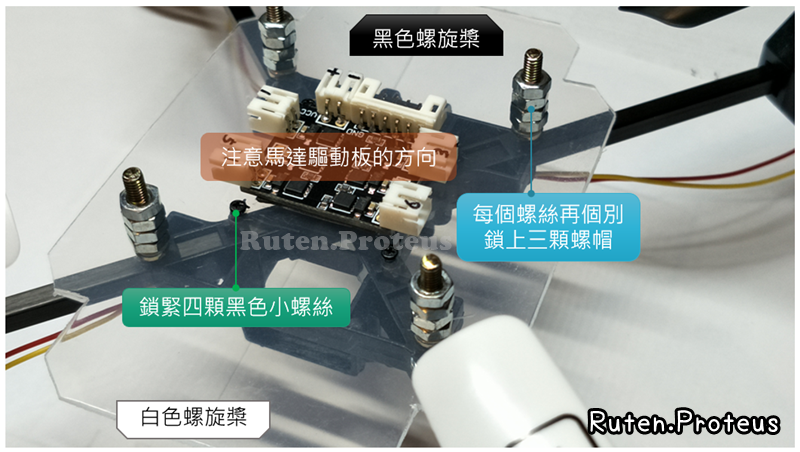
接著,照著下圖,鎖上螺絲、螺帽和貼上馬達驅動板到塑料板上。
這裡有一點要注意,黑色小螺絲鎖的時候要凸過塑料板底部一些(如果真要知道尺寸,那大概 0.5 mm),等一下在鎖這四顆螺絲到馬達連接座時,會容易一些!

接著再拿出四顆黑色小螺絲,把這四顆小螺絲試鎖到馬達連接座上去(不需要鎖到底)再退出來,做個預攻牙的動作,等一下鎖塑料板的時候,會很容易對到孔和固定。
如下圖所示,用黑色小螺絲對準馬達連接座的四個柱子上的小洞,然後鎖上、鎖緊(別使蠻力往死裡鎖)。
再拿出套件裡 12 顆螺帽,每一個螺絲個別再鎖上三顆螺帽。每一個螺絲上的各個螺帽,都要個別鎖緊後,再鎖緊另外一顆。
現在,你可以把馬達接頭接上馬達驅動板了!
做馬達接頭的時候,線留得很長!為了避免線被螺旋槳打到,你可以把線繞在碳纖維桿上面(如下圖所示),可以多繞幾圈讓線看起來更簡潔。
下圖為了展示只繞了兩圈,比較容易看清楚。

繞線要注意!線最好由碳纖維桿底部出來再接到馬達驅動板,這樣可以避免飛行的時候螺旋槳打到線。

【(05)飛控板安裝】 [V3.1]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(05-01)升壓模組安裝 [V3.1]:
從套件中拿出一片 2 公分的雙面膠,貼在升壓模組的背面,撕開保護膜貼到連接板的底部(如下圖所示的位置),再把做好的馬達驅動板訊號線和升壓模組的 PH2.0 接頭的電源線,插到馬達驅動板上。

/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(05-02)飛控板固定 [V3.1]:
從套件中拿出四顆螺帽,(如下圖所示)先旋進標示為 2、3 和 4 處的螺絲中(不要鎖緊)。然後使用尖嘴鉗再夾上一顆螺帽,(有耐心的)旋進表示為 1 處的螺絲中,直到完全鎖緊。最後再依序鎖緊 2、3 和 4 處的螺帽。
會這樣做的原因是,1 處的螺絲靠近杜邦排針的塑膠,所以鎖螺帽的時候會被卡到;除非你用美工刀修掉一些杜邦排針的塑膠,不然就需要借用尖嘴鉗施力,把螺帽鎖進此處的螺絲中。

【(06)接線】 [V3.1]
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(06-01)5V 電源與馬達驅動板訊號線的連接 [V3.1]:
飛控板的電源輸入,需要注意正負極,千萬不可插錯!
如下圖左方所示,橘色為正(+5V)、綠色為負(GND)。
馬達驅動板與飛控板的連接,就如下圖右方所示,一樣插就可以了。

/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(06-02)藍牙模組的安裝與連接 [V3.1]:
藍牙模組利用一條兩頭都是 4P 杜邦接頭的通訊線做連接,所以要先來製作它。
這條線取用至 6P PH2.0 那一條線剩下的那半部分,取用其中的 4 根線,長度為 8 公分,進行這條線的製作。
套件裡面有杜邦針以及 4P 杜邦膠座。做好杜邦針頭後,參考下圖把杜邦針頭插入到相對應的位置。
完成後,照著下圖一樣,把線先插到藍牙模組。
** 不管你多有自信,線做好之後一定要用電表測試是否真的導通?

如下圖所示,準備好藍牙模組的通訊連接線(要注意這條線是有方向性的),一頭插到藍牙模組上,另一頭插到飛控板 UART 的接頭。

從套件中拿出一片 3 公分的雙面膠貼到藍牙模組的底部,撕掉保護膜後將其貼到無人機尾部(也就是如下圖所示的位置),這裡同樣的也必須注意螺旋槳與此線的距離。
我的作法是,先試著測一下實際要貼上的位置,然後轉一下螺旋槳測一下距離,如果距離很尷尬的話,就轉一圈通訊線再重新調整貼的位置,直到沒問題後再完全貼上、貼牢。

下面是藍牙模組貼好之後,另一個方向的照片。

【(07)鋰電池置放塑料底板安裝與說明】
拿出套件裡四顆黑色小螺絲,以跟安裝飛控板塑料連接板的步驟一樣的方式,把鋰電池置放塑料底板安裝到無人機底部的馬達連接座上。

在不安裝底板的時候,只有既有的馬達連接座上的鋰電池槽孔可以用。因為這個槽孔大小的緣故,可用的鋰電池的尺寸和容量限制比較多。

在裝上底板後,增加了不少的寬度,而且可由無人機的側邊裝鋰電池,可用的鋰電池尺寸和容量選擇比較多。

因為套件中沒有提供鋰電池,所以若是在鋰電池選購有任何問題,可以跟賣場詢問。
【(08)結論】
完成無人機組裝之後,接下來就可以參考 "{3} 自製四軸無人機 - Arduino MWC Nano 飛控板焊接建議與說明" 裡面,關於飛控板測試與校正這一小節做感測器的校正和無人機參數設定,之後就可以由雲端硬碟中所建議的 APP 做參數設定和進行飛行控制。
.
.
<<部落格相關文章>>
-
{5.1} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.1 DIY
套件小改版組裝說明
針對 V3.0 改版為 V3.1 的部分作補充的組裝說明。 -
{5} 自製四軸無人機-Arduino MWC Nano 大四軸無人機 V3.0 DIY
套件組裝說明
以{4} 自製四軸無人機 - DIY 套件的組裝說明 作為基礎,四軸無人機 V3.0 DIY 套件的組裝說明。 -
{1} 自製四軸無人機 - {使用預設PID} 飛行測試
未調整之前使用預設的 PID 參數的飛行測試;主要是測試通訊以及硬體動作是否正常運作。

-
{2} 自製四軸無人機 - PID 調整後的飛行測試
為了快速調整 PID 參數並能馬上做測試,由於硬體沒有改變,因此修改韌體為使用遙控器做操作,手機藍牙連線 MWC Nano 飛控板做即時的 PID 調整,直到調整後做飛行測試,實際測試的結果比使用預設參數更為順手,反應也更加靈敏與好操作。

-
{3} 自製四軸無人機 - Arduino MWC Nano 飛控板焊接建議與說明
飛控板焊接建議、接線與測試校正說明。

-
{4} 自製四軸無人機 - DIY 套件的組裝說明
四軸無人機 DIY 套件的組裝說明

-
{SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 1 of #} 預設 PID
自穩與飛行(翻滾)測試
網頁中有兩種使用 SP Racing F3 EVO 四軸 8520 空心杯馬達無人機飛行測試影片。 -
{SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 2 of #} 8520
小四軸機架組裝說明影片
利用影片來重點講解 "SP Racing F3 EVO 四軸 8520 空心杯馬達無人機 DIY 套件" 中的機架與 8520 空心杯馬達如何做安裝,也簡單說明一下螺旋槳與飛控板在安裝要注意的點。
.
.
沒有留言:
張貼留言
留言屬名為"Unknown"或"不明"的用戶,大多這樣的留言都會直接被刪除掉,不會得到任何回覆!
發問問題,請描述清楚你(妳)的問題,別人回答前不會想去 "猜" 問題是什麼?
不知道怎麼發問,請看 [公告] 部落格提問須知 - 如何問問題 !