網頁最後修改時間:2022/03/20

本篇是兩輪小車 V1.0 DIY 套件的組裝建議說明,裡面內容有:
*********************************************************************************
更多機器人(多足、智能小車)相關商品,請至分類賣場。
*********************************************************************************
【(00)工具準備】
小車要做組裝,需要幾樣工具:
- 十字螺絲起子
鎖十字螺絲用的。 - 夾子或尖嘴鉗
夾住螺帽或固定住螺帽鎖緊螺絲用的。 -
焊接用具
兩顆直流馬達電源線的焊接和模組轉接擴充板的接腳焊接。
【(01)小車底盤組裝】
此套小車底盤的組裝,基本上跟下面連結中的沒什麼不同,照著做就可以完成,但有幾個地方組裝需要注意一下:
** 小車零件在底盤的配置建議圖,可看(02)開發板和擴充板小節。
-
萬向輪
萬向輪與壓克力底板的安裝零件中,中間作間隔的六腳銅柱,可能是雙通六角銅柱或是單頭六角銅柱。差別在於,雙通六角銅柱兩邊都使用十字螺絲固定,單頭六角銅柱則是一邊是螺絲固定而另一邊是螺帽固定。 -
直流減速馬達電源線焊接
參考連結中沒有特別對於電池盒安裝作說明,但是這裡要注意,若是馬達線和 18650 鋰電池盒的電源線有特別作杜邦頭的話:對於鋰電池盒來說,紅線就是正極,黑線就是負極;馬達線不分正負極,若轉向錯誤變換一下杜邦頭插在馬達驅動板的方向就行,但建議兩個馬達都像下圖一樣焊接,之後接線就會跟照片中的一樣。
另外,套件中沒有附束線帶(沒備到),可向我要熱縮套管或是束線帶,不然用熱溶膠也是一個辦法,要盡量想辦法讓馬達線不容易斷掉!

其他的組裝步驟,照著下面組裝連結網頁裡的說明就可以完成。
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
組裝參考連結網頁:
ㄆㄜ ㄊㄧㄡ ㄙˋ: { EP8266 WiFi 控制小車 } [ 1/3 ] - 智能避障循跡小車底盤構件組裝建議說明 (ruten-proteus.blogspot.com)
【(02)開發板和擴充板的組裝】
如下圖所示。粉色(虛線)表示該零組件(萬向輪、馬達輪組、2S 鋰電池盒和循跡模組)裝設在壓克力底板底部,粉色(實線)表示該零組件(Arduino UNO、ESP32 UNO、馬達驅動板和模組轉接擴充板)裝設在壓克力底板上面;藍色(實線)表示可再自行安裝在壓克力底板上面的零組件(兩軸舵機雲台和測試模組)。

/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
【可用的測速模組】
賣場使用下面這種類型的槽式測速模組來設計測速模組安裝處的孔位,測試過至少三種不同型號的槽式感測器,所以該孔位適應性很好,若手邊有該模組可以自己加上,因為此測速模組搭配到其他套件分類中,所以還沒上架販售。

/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
/*--*//**---/*///**---*-*////***--*/*///***----*///--*/*///**--*/*//**--**/*//
*
(02-01)模組轉接擴充板的焊接:
模組轉接擴充板各接腳佈局的說明如下圖所示。

板子預留兩組 2.54mm 接頭用於 UART 通訊模組,例如 UART 轉 WiFi 或 UART 轉藍牙等...模組皆可。以藍牙模組來說,只會用到橙色WiFi 或藍牙模組接線處右邊的那組(要焊接杜邦母座)。
若有使用到循跡模組,粉色循跡模組訊號接腳處有 2.0mm 和 2.54mm 接頭或排針焊接的選擇。依現在套件分類的配置,預設是焊接使用 2.0mm 接頭的方式。若沒有使用到循跡模組,這組接腳就能另外作為它用。
WiFi 或藍牙模組接線處和 EXT5V 擴充接腳這兩個地方的電源都來自 WiFi 或藍牙模組接線處,而降壓模組的 <VIN> 電源與 Arduino UNO 和馬達驅動模組都來自鋰電池,所以這裡的(<EXT5V>)電源是獨立電源,非來自於 Arduino UNO 的 <5V>。來自於 Arduino UNO 的 5V 電源在中間綠色部分,有兩組:上是 +5V,下是 GND。
上面這些東西要先焊接,之後利用如下圖所示的方式,焊槍不要停留在接腳太久,快速焊接 Arduino UNO 擴充接腳。

焊接好的模組轉接擴充板就如下圖所示。

準備好 Arduino UNO / ESP32 UNO 開發板(下面統稱 UNO 開發板)、馬達驅動板、單頭六角柱和十字螺絲(要選(M3 x 6)比較短的那四支)。

依照下圖先把單頭六角柱和十字螺絲鎖好在 UNO 開發板上。

再把馬達驅動板插到 UNO 開發板上。

/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
【馬達驅動板使用注意事項】
此塊馬達驅動板,根據選擇的主控開發板是 Arduino UNO 或 ESP32 UNO,使用的電壓準位會有所不同,出貨的時候會先處理好,千萬不要隨意混用!
隨貨資料中有這塊板子的使用說明與電路圖相關資料,相關資訊都在裡面,有需要可自行參閱!
/*-/--*-*/*/*/*/***//-*-*-**-*/*-*-/*/*/*-*-/-////--/**/**--**/--///--//**----**//--**//**----***//*-**//*
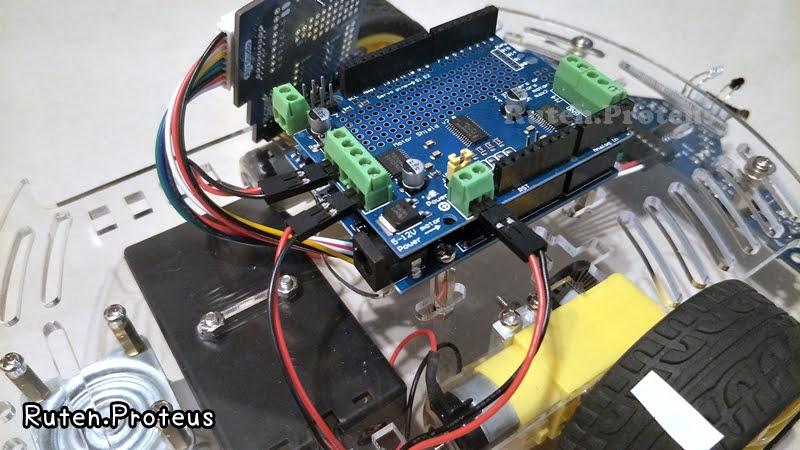
接下來在插上模組轉接擴充板之前,如果有雙頭等長排針的話,記得先鎖好到馬達驅動板的 <M1>、<M2> 和 <Power> 接線端子上,否則至少要先把鋰電池的電源線鎖好,不然插上模組轉接擴充板後,<Power> 接線端子就不能拆了。

如下圖所示,再插上模組轉接擴充板。
除外部電源處之外,馬達驅動板上可用的接腳和接線端子處,即便模組轉接擴充板插在上面,但能露的就露,需要的時候就可以用。

如下圖右下方,是 <RESET> 按鈕、 Servo 1 和 Servo 2 (分別是 Arduino UNO <D9> 和 <D10>(ESP32 UNO <13> 和 <5>))的伺服馬達接腳組露出的部分。

如下圖右上方所示,還有四支馬達驅動板釋出可用的接腳 <15>、<14>、<1> 和 <0>,這四支接腳是 PCA9685 未用到的接腳。

拿出組裝好的小車底盤,將開發板放置到小車底盤上面中央處,然後翻轉過來底部朝上。可以清楚地由下圖看到,UNO 開發板的固定處是拉長孔的型式,可以自行移動到適當位置再做固定。

位置確定之後,鎖上四顆螺絲固定開發板(鎖緊,但不要使勁鎖!只要鎖到底後,再稍微施加一下力即可)。

現在可以把小車翻轉回來,準備下一個循跡模組的安裝。
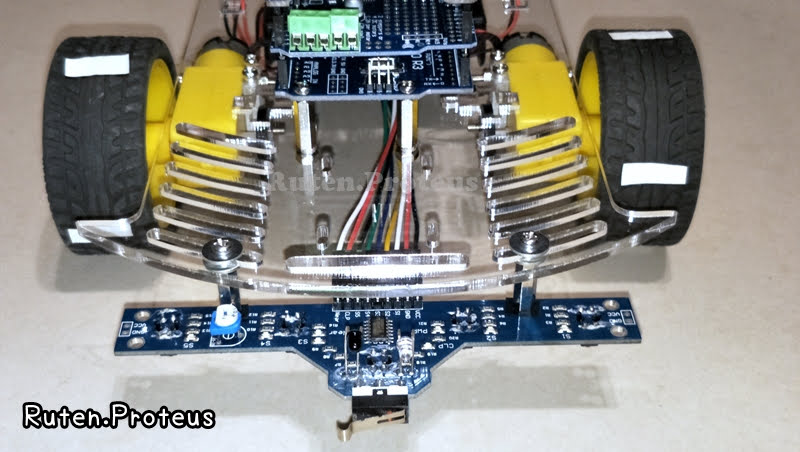
【(03)循跡模組的組裝】
準備好循跡模組、十字螺絲、墊片、六角柱和螺帽。
其中,六角柱螺紋端和螺帽,是用來固定循跡模組的;十字螺絲、墊片與六角柱螺孔,是用來將循跡模組固定在小車底板下面的。

組裝之前有一個問題要先提醒一下!
循跡模組(Top 面)的固定孔(如下圖所示,R17 下面的孔,和 R2 與 R5 中間的孔),這兩個孔都是接 <GND> 的過孔,但上面的線是 <VCC>,六角柱的大小剛好會在這條線的上面,兩個孔都是,組裝時要特別注意!

循跡模組左邊的固定孔。

因為需要測試、拍照等...的關係,所以時常要拆裝循跡模組,尤其都是由六角柱拆裝的關係,很容易像我一樣把循跡模組上的保護層磨掉了,造成短路。
有兩種建議組裝方法可以避免這種問題:
- 將六角柱插入固定孔後,固定六角柱不動改由循跡模組底部的螺帽旋轉鎖緊,而不要固定螺帽後由六角柱作旋緊的動作。
- 如果已經磨損造成短路(像我一樣),剪塊電工膠帶貼在固定孔上面,然後用美工刀把孔挖出來再做固定(如下兩張照片所示)。


如下圖,先把六角柱螺絲端穿過循跡模組的固定孔,再用螺帽鎖緊固定好六角柱在循跡模組上。

拿出 9P 的杜邦轉接線,將杜邦線依順序接到循跡模組上。
如下圖所示,9P 接頭處的黑線就是第一根線,要接到循跡模組的 <VCC> 接腳。

依序接上後,就如下圖所示。
** 有一點需要注意的!9P 的杜邦轉接線不是一定是那樣的顏色編排,但因為 2.0mm 9P 接頭有方向性,所以循跡模組接線的時候,一定要注意接的順序和方向!

將 9P 接頭從小車底盤底部拉出,如下圖所示。

準備十字螺絲和墊片,將剛剛組好的循跡模組,依照下圖所示組裝在一起。

完成循跡模組的組裝後,就如下圖所示。
【(04)7.4V 18650 鋰電池盒組裝】
準備下面 18650 鋰電池盒、十字沉頭螺絲和螺帽。

將電池盒如下圖一樣,固定在小車底盤下。一般來說,電池盒的紅線代表正極,黑色代表負極。不過在把電池盒電源線插到模組之前,還是需要用電表量一量是否正確,避免與預料中不同的情況出現,完成後就拆掉電池!

【(05)接線】
只有四個地方需要接線:
- 模組轉接擴充板的 2.0mm 9P 接頭
- 馬達驅動板
- 7.4V 鋰電池電源輸入
- M1 / M2 直流馬達電源輸入
先把 2.0mm 9P 接頭,插到如下圖所示模組轉接擴充板的地方。

再將馬達驅動板外部電源與左右直流馬達,如下圖所示的接法接上。
** 馬達電源接的方向不同,調換就可以!外部電源就一定要正確,務必確認再確認!
【(06)降壓模組和藍牙模組的組裝】
拿出降壓模組(下圖左)和 BLE 藍牙模組(下圖右)。

將兩個模組照著下圖的方向插上去。
** WiFi 或藍牙模組接線處上面所標示的 <R> 和 <T> ,分別代表的是通訊模組的 Rx 和 Tx,不是 Arduino UNO 或 ESP32 的 Rx 和 Tx,這兩隻接腳的訊號在 PCB 已經先跳過線了。

大功告成!


接下來只要上傳程式和安裝好對應的手機 APP,就能開始玩了!
.
.
<<部落格相關文章>>
- {04}兩輪智能小車-ESP32 PS3/PS4 遊戲手把控制遙控車
- {03}兩輪智能小車-控制端軟體介紹與測試
- {02}兩輪智能小車-BLE(Bluetooth LE,低功耗藍牙)模組的設定
- {01}兩輪智能小車-V1.0 DIY 套件組裝建議說明
- {00}兩輪智能小車-V1.0 DIY 套件 Arduino UNO / ESP32 BLE 遙控車、PID 循跡車展示影片
- { EP8266 WiFi 控制小車 } [ 1/3 ] - 智能避障循跡小車底盤構件組裝建議說明
- { EP8266 WiFi 控制小車 } [ 2/3 ] - 電路佈線與馬達轉向測試
- { EP8266 WiFi 控制小車 } [ 3/3 ] - 小車路試
- eZ430 運動手錶控制樹莓派小車 ( 開迴路控制 )

.
.
沒有留言:
張貼留言
留言屬名為"Unknown"或"不明"的用戶,大多這樣的留言都會直接被刪除掉,不會得到任何回覆!
發問問題,請描述清楚你(妳)的問題,別人回答前不會想去 "猜" 問題是什麼?
不知道怎麼發問,請看 [公告] 部落格提問須知 - 如何問問題 !